AI-Driver Behaviour
DEMO
I created this project as a solution to one of my university gaming modules. The module was designed to help us understand and apply game AI techniques. I took a unique approach by developing realistic AI-driver behaviour.
Overview
This project is focused on developing a realistic AI-driver behaviour model simulation for car racing games using Unity. The primary goal was to implement AI techniques and partial car dynamics to create unique and realistic behaviours for AI-controlled car. these behaviours will include but not limited to accelerating, braking environmental awareness, steering behaviours, and reactive behaviours.
AI techniques used:
-
Behaviour modelling & Decision-making.
-
Finite State Automata (FSM, HFSM).
-
Fuzzy Logic & Set.
-
-
Perception
-
Obstacle avoidance.
-
Raycasting with Linear Algebra.
-
-
Pathfinding
-
Waypoints
-
Dynamic waypoints.
Addition Experiments:
-
In addition to this project, I explored other AI techniques intending to integrate them into the project:
-
Fuzzy Logic & Set. (Integrated)
-
PID - Proportional-Integral-Derivative.
-
Vector flow fields.
Figure 1, below show the sub-system of the AI driver behaviour as well as the Car system (aka Car Engine) which was built with the Unity Physics Wheel Collider.
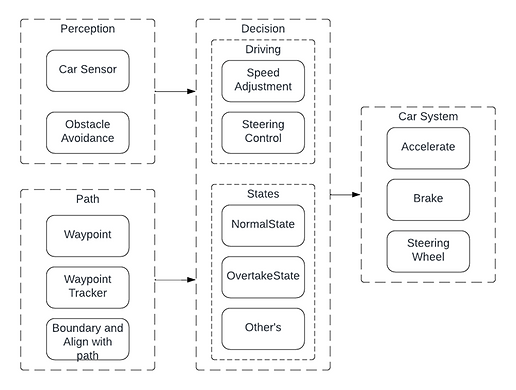
Decision Making
Figure 1. Behaviour model
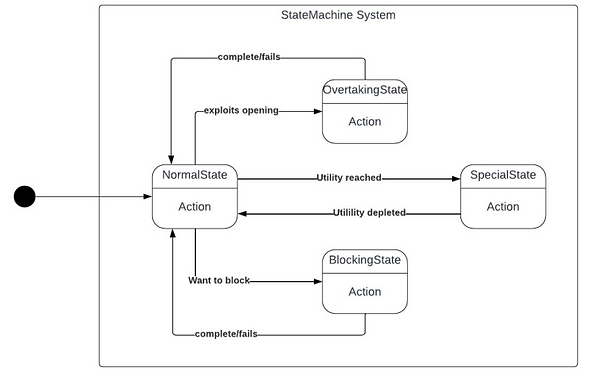
Figure 2. Behaviour State UML
Behaviour State - FSM
FSM was used to manage the drivers behaviours, Figure 2. illustrates the states and high level transition condition.
Behaviour State - FSM
Table 1, Illustrates Boolean logic condition are predefined to decide transition. Special state uses predefined values to decides transition when the threshold are met.
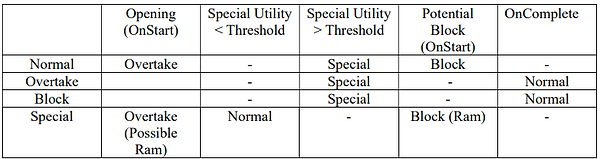
Table 1, State Transition condition
Speed Adjustment - Fuzzy Logic
Fuzzy Logic is used to model the degree to how unique drivers understanding of distance and their current speed, and make decision accordingly.

Figure 3, Fuzzy Process
Speed Adjustment - Input Value/Data
Processes the driver current speed, distance (based on relative obstacle retrieved from perception module) and unique driver speed and distance allowance.
Speed Adjustment - Fuzzifying the info
To avoid complex mathematical calculations, Unity Animation (Figure 4) Curve was leveraged ro define the degree of membership (DOM)
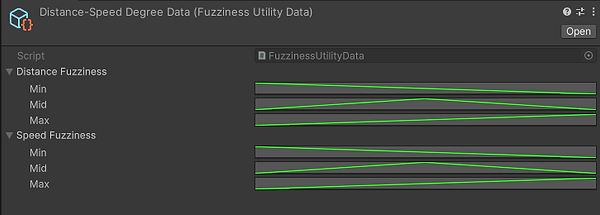
Figure 4, Degree of Membership Unity Animation Curve
Speed Adjustment - Interference
Rated or define input data "Speed & Distance" as Big, medium or Small based on DOM.

Table 2, Fuzzy decision Rule set
Speed Adjustment - Defuzzification
where the system evaluates Speed and Distance Rating based on Action rule set (Table 2).
Speed Adjustment - Output
A simple FSM within the main driver behaviour state, used to define how driver interface with Car Engine.

Table 3, Action Fuzzy Set Definition
Perception

Source code and in-depth details available on request.